Project information
- Language: Python
- Simulator: Gazebo with ROS
- Libraries: OpenCV, Matplotlib, Numpy
- Category: Path Planning
- Code Repo URL: github.com/Sudharsan10/A-star-implementation-in-turtlebot-3/
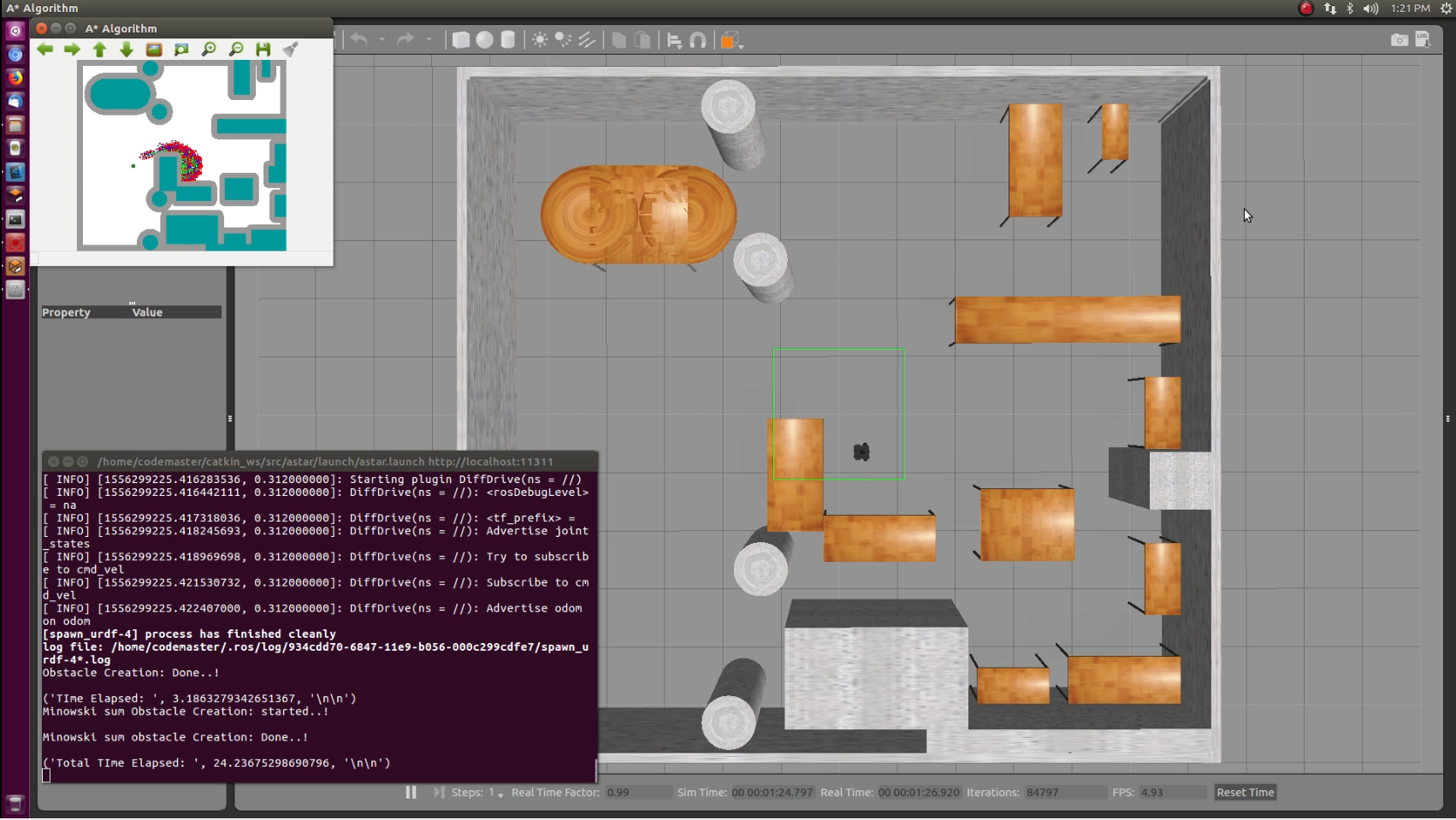
Summary: Goal of this project is to simulate a TurtleBot 3 in a Lab environment and to find a path to given location within the lab using A* algorithm without hitting the obstacles in the lab.
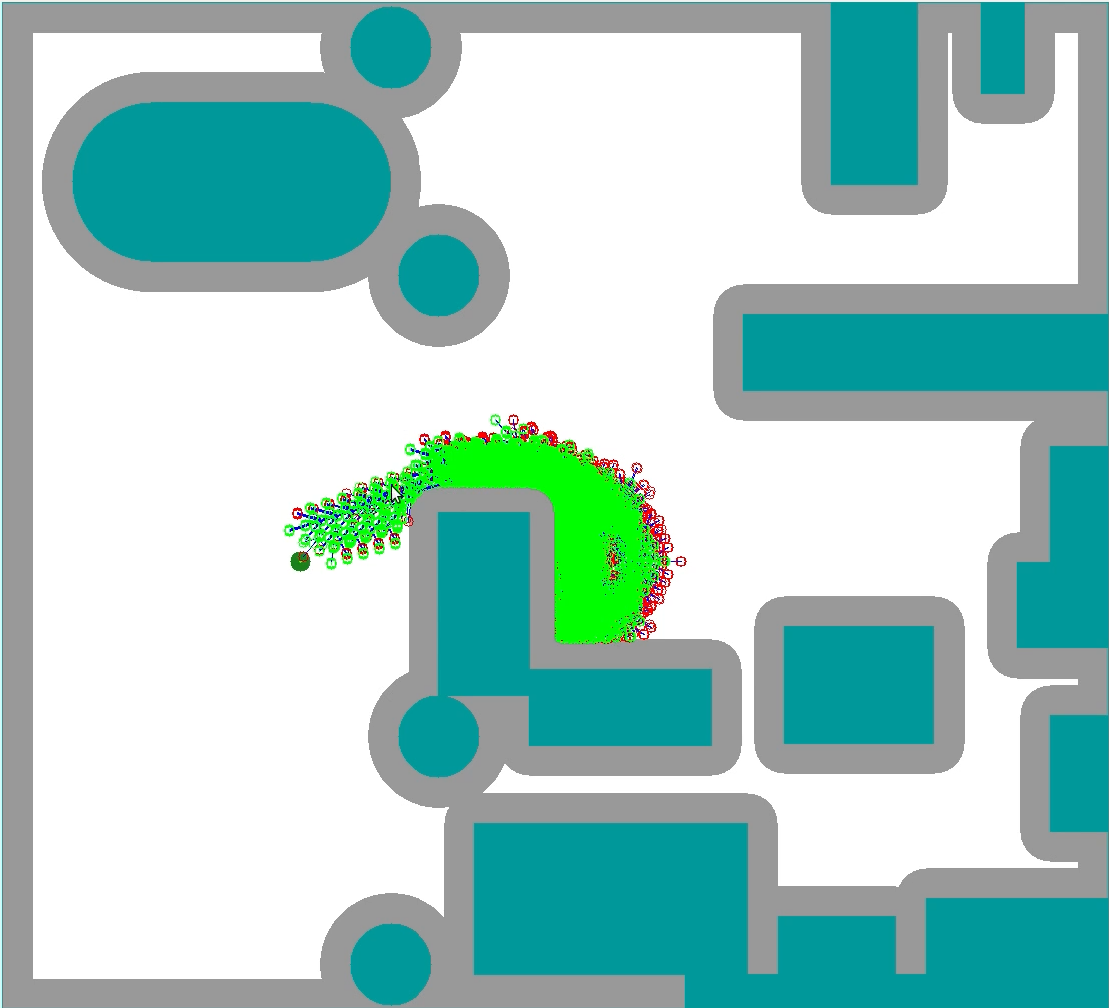
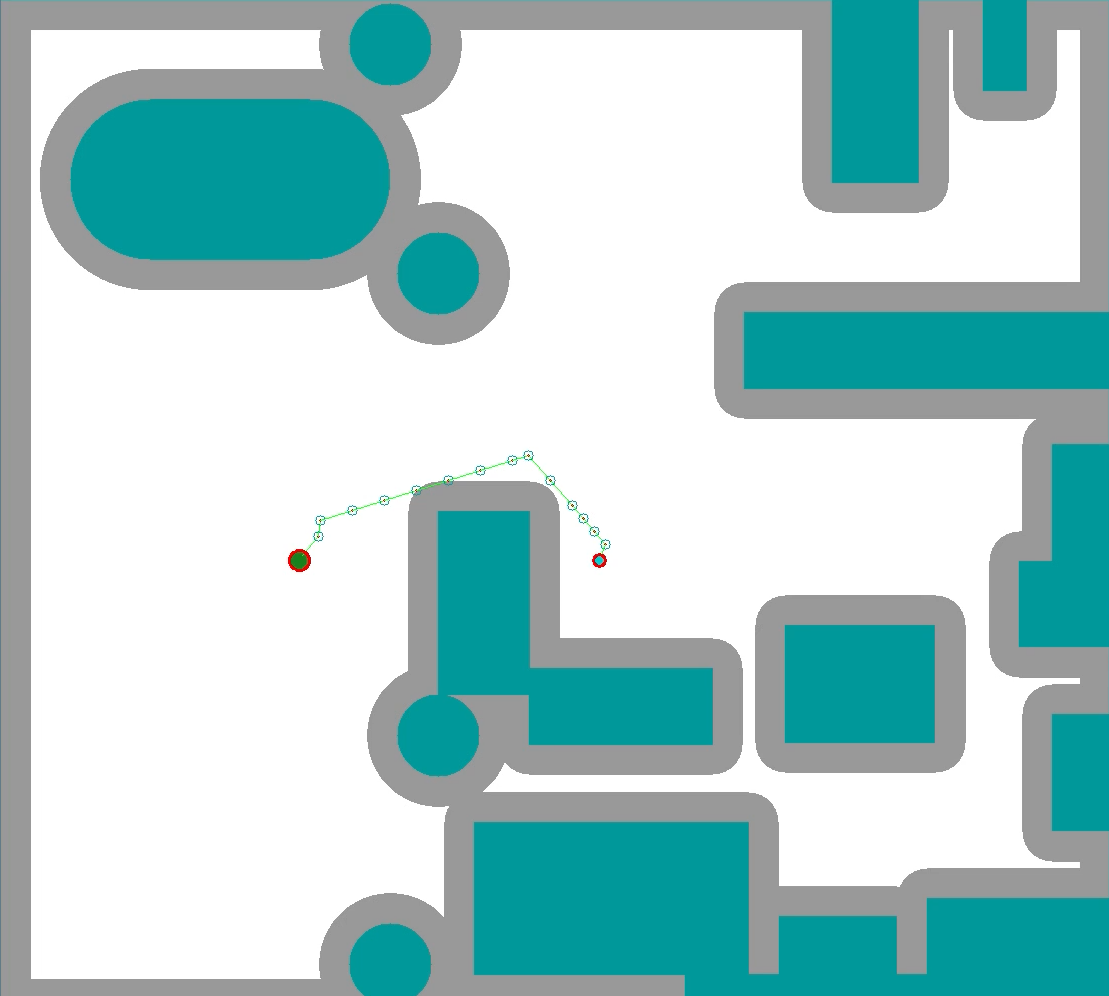
Exploration and path planning
Implementation
- Step 01: Implement A* algorithm with differential constraints with the specs of Turtlebot3
- Step 02: Add ROS code to publish the solution from Step 01
- Step 03: Run the Turtlebot3 simulation env in Gazebo using lab env file and run the node with code that publishes the solution.
Sneak Peek gif