Project information
- Language: C++
- Libraries: mms simulator
- Category: Path Planning
- Code Repo URL: github.com/Sudharsan10/maze-solver-robot/
Summary: This project is focused on optimising a maze solver implementation algorithm to get a faster and efficient execution of exploration, mapping and solving the maze simultaneously. It uses MMS Simulator for GUI to visualize the robot in real time inside the maze and 16x16 MMS Maze files to benchmark the perfomances.
Optimization
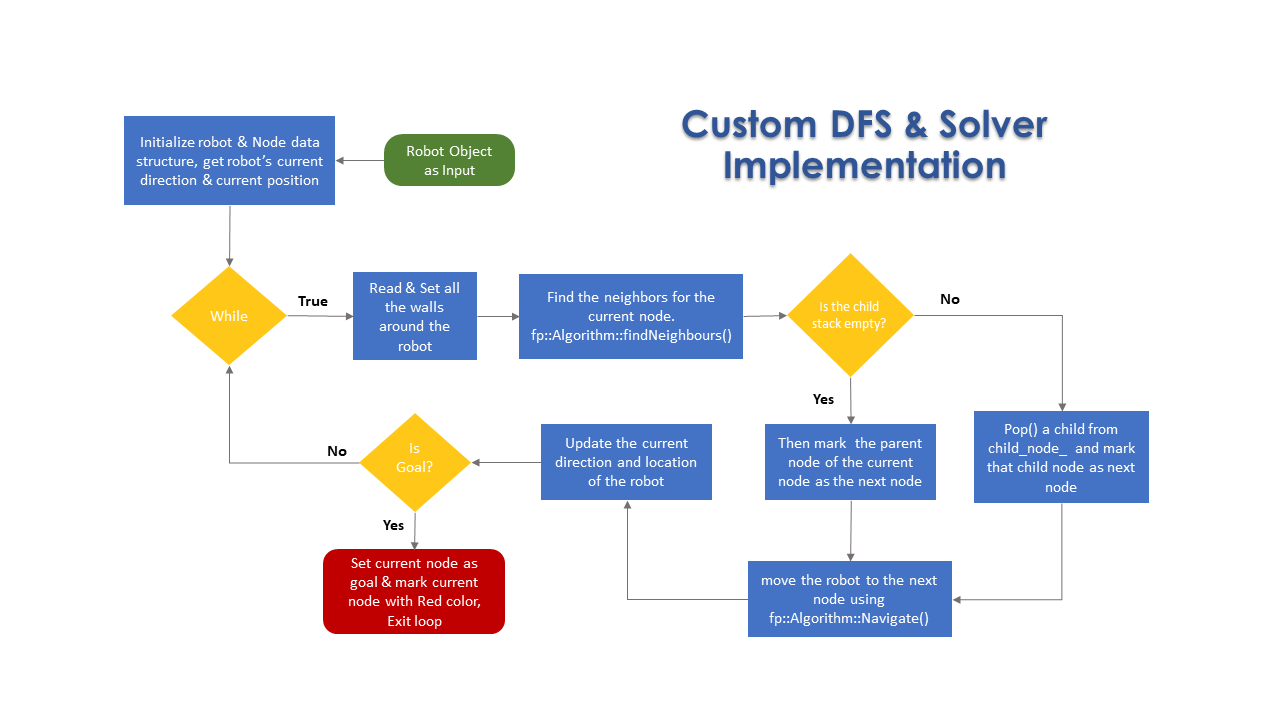
The optimised code has two main steps - optimize the solver implementation algorithm and use a efficient data structure,
- Step 01: Implement Custom maze solver algorithm which optimises the efficiency of the exploration, mapping and Solving the maze simultaneously
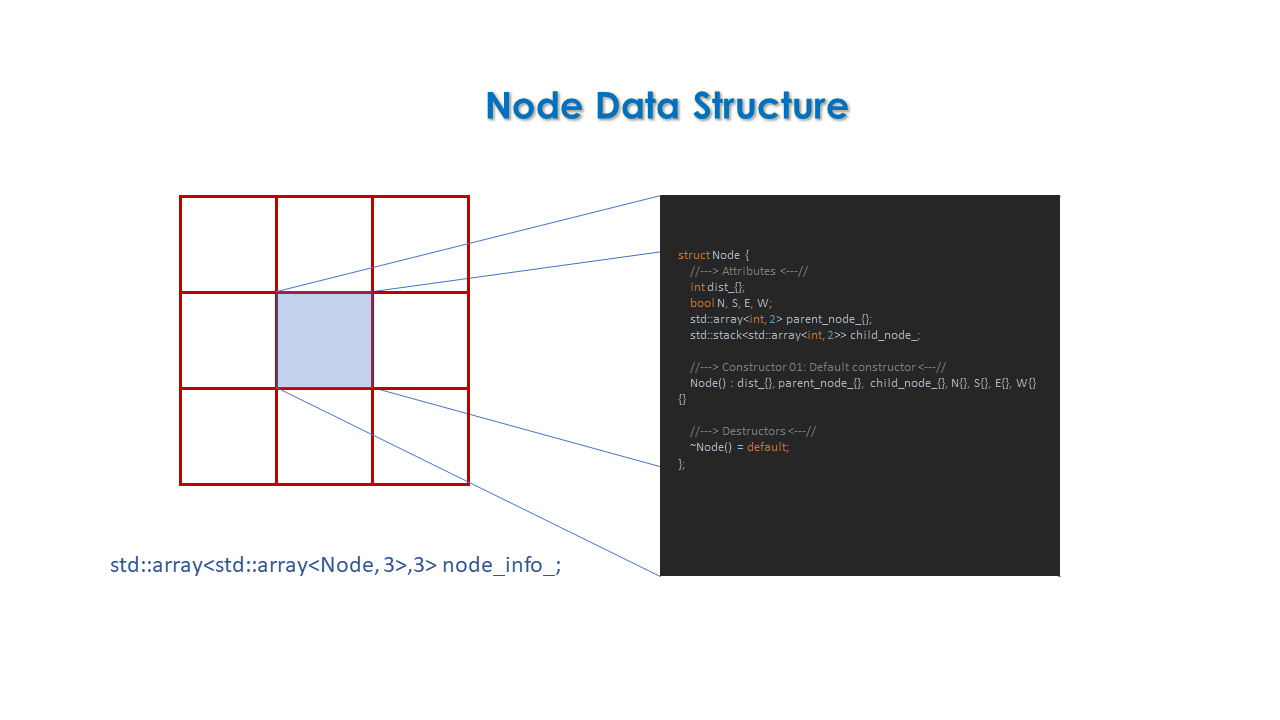
- Step 02: Devise a custom data structure that make the optimization in the Step 01 feasible.
Sneak Peek gif
Results
The optimized code was able to deliver 3x - 15x performance boost depending upon complexity of maze and was able to solve any given 16 x 16 maze file under less than 10 sec at full execution speed in mms simulator.